We develop novel motion planning and control algorithms using advanced learning methods to synthesize safe and robust systems for scaled autonomous vehicles. Our research models safety mathematically, enforcing robust guarantees on nonlinear vehicle templates.
Aggressive Maneuvers & Hazard Avoidance
We proposed using stunt and aggressive maneuvers with confidence, similar to those performed by professional race car drivers. These methods can serve as advanced safety features for critical hazard avoidance.

Autonomous J-turn Maneuvers
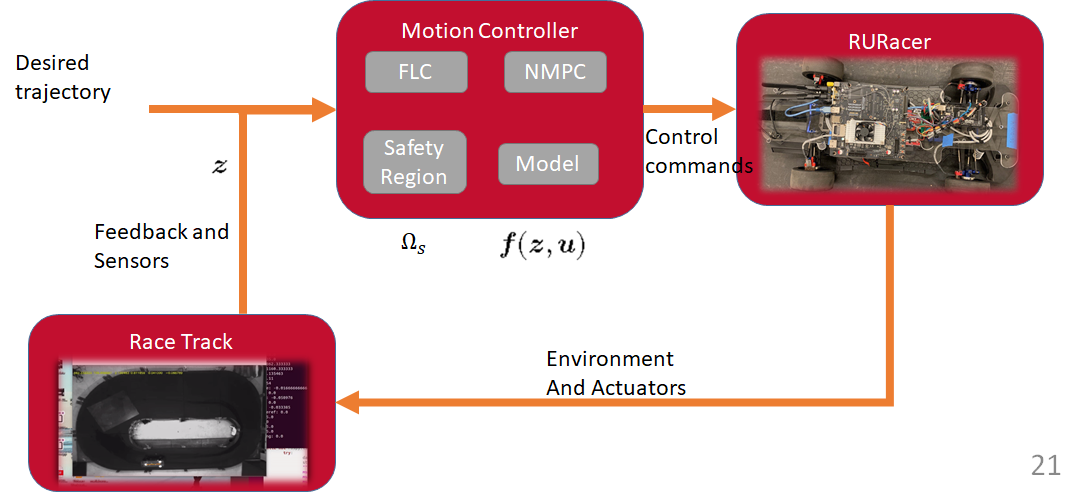
Inspired by professional racecar driving techniques, we implement safe motion control and planning for tight trajectory tracking.
Research Highlight
Key Publication: "Safe Motion Control and Planning for Autonomous Racing Vehicles", Aliasghar Arab, Rutgers University, 2021. [Thesis]