RU-Racer 1 and 2

RU-Racer 2
The goal of RURacer-2 was to create improve platform performance, such as more accurate wheel encoders and more advanced embedded processors. Compared to RURacer-1, the new platform can reach four times lower latency (less than $7ms$) and twenty times faster computation power. To achieve this, an hardware architecture was designed along with the custom fitting of wheel encoders to monitor individual wheel speed and easily accessible and flexible hardware, software, and interfaces. An upgraded IMU system was also added to the new version capable of estimating the vehicle’s rotations in three dimensions in addition to 3D angular velocities and linear accelerations. This platform allows researchers to take advantage of the latest software and hardware platforms, such as the Robotic Operating System (ROS) and the NVIDIA Jetson TX2 system on module (SOM).
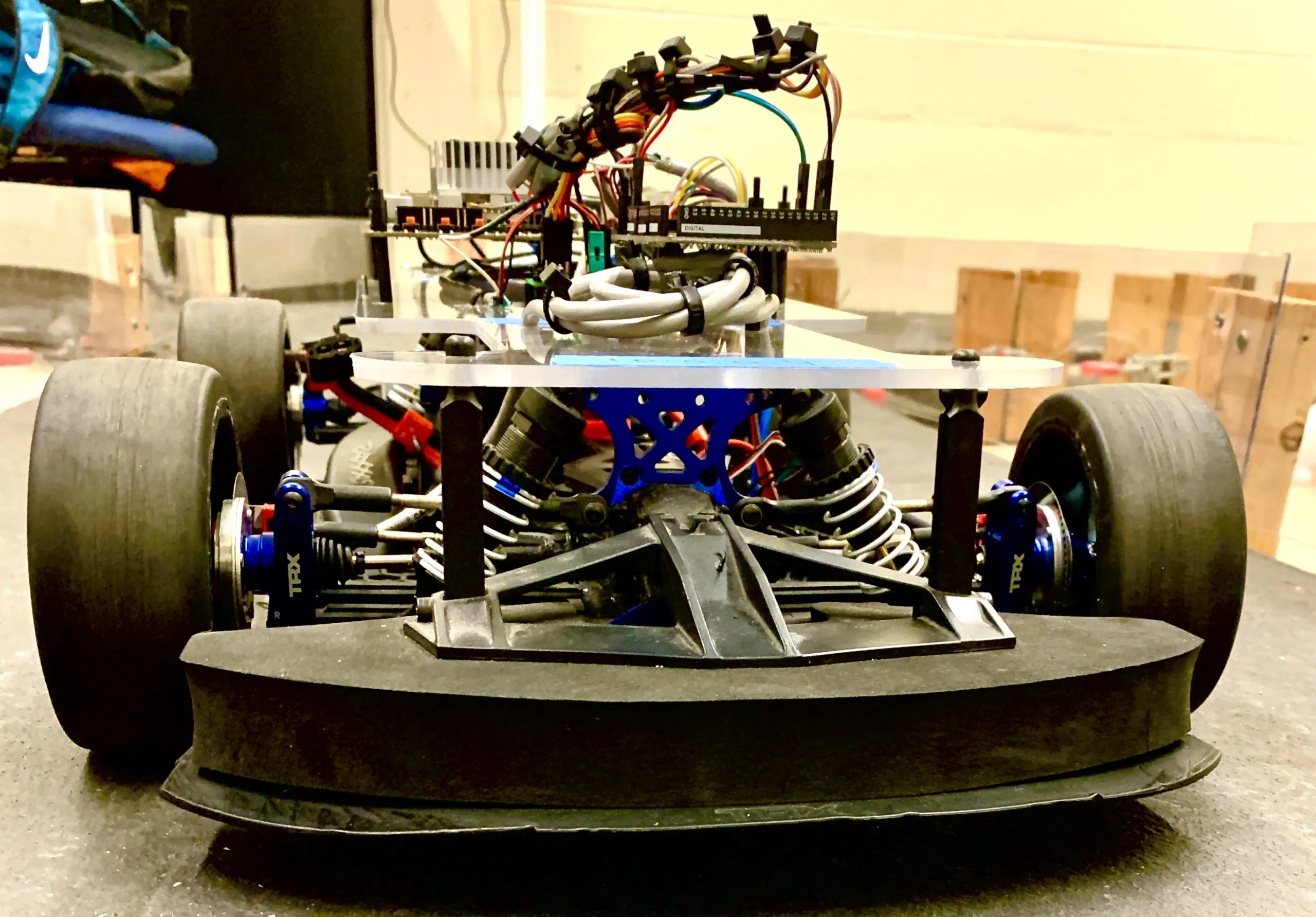
Hardware and software architecture The scaled vehicle chosen for this project is a similar 1/7th scale Traxxas XO-1. The XO-1 shown is highly capable of drifting as it features an optional rear-wheel drive system and can reach up to $100$ miles per hour (MPH). To monitor individual wheels’ angular velocity, optical wheel encoders (EM1 from US Digital) were custom fit and assembled on each side of the axles.
We chose NVIDIA Jetson-TX2 to control the vehicle because of it’s high computational power for real-time processing. TX2 is running the Linux kernel with an Ubuntu operating system created by NVIDIA called L4T. Also, TX2 features onboard WiFi, which we set up to connect to the router and the host computer for real-time communications. The host computer provides high computational power at the edge for resource-hungry algorithms such as motion planning or image processing. The communication framework is built on top of ROS to receive and send data from different processing nodes.
A microcontroller controls the steering wheel’s servo and the speed of the brushless motor. Also, optical encoders are connected to the microcontroller, communicating to TX2 by Universal Asynchronous Receiver/Transmitter (UART) using \textit{rosserial}. Using UART, we achieve a $100:Hz$ frequency for real-time sensor data acquisition and actuator control. This allows running the NMPC motion controller on TX2 while the lower level programming part is on the microcontroller.
The IMU used for RURacer-2 is provided by Adafruit-BNO055, providing 9 DOF sensing information, that it has been difficult before. We used a 3.2 Mega Pixels (MP) FLIR Blackfly GigE camera at $30$ frames per second, resulting in up to $2.6 mm$ of accuracy to localize the vehicle. The camera is connected to the network, and the image processing node is running on the edge processing unit, which is a powerful desktop computer. The architecture used for RURacer-2 is provided here.
Chassis
- Modifieed Traxxas XO-1
- Custom designed wheel encoder mounts
Sensor Suite
- BNO055 Bosch IMU
- Optical wheel encoders on each wheel
Embedded System
- NVIDIA TX2 SOM with custom carrier board
- ATmega 2560 Arduino compatible microcontroller
- DC battery for power supply
Software
- L4T (Linux for Tegra)
- ROS enabled
- Velocity feedback controller
RU-Racer 1 (Initial platfrom)
This platform was designed and built initially on 2013-2014. It is a 1/7 scaled robotic vehicle (Traxxas XO-1 model) which was modified with various added onboard sensors and actuators. The vehicle is four-wheel driven by a powerful brushless motor with the front and rear differentials. At each wheel, an electric disc brake is added to provide active braking capability. The steering and the brake actuators are operated by the servo motors that are controlled by the onboard embedded system. Four potentiometers are added to the suspensions to measure the deflection and thus the normal forces at each tire. Two rotating potentiometers are added and used to measure the steering angle. All onboard sensors and actuators are connected to an embedded real-time system (myRIO from National Instruments) with sampling and control frequency of 1 kHz. The values of the robotic vehicle parameters are listed in Table I.
RU-Rover (Off-road version)
The scaled racing truck was built and modified by Alborz, Dimitri, Feng, and Ali from an RC platform (Traxxas Maxx). Encoders and inertia measurement unit (IMU) were installed to measure the front-and rear-wheel velocities and roll/yaw angles. A Jetson TX2 computer and Teensy4.0 microcontroller were used for onboard computation purpose.Picture below shows the physical model.